- HOME
- 世界初バッテリーレス カプセル内視鏡 Sayaka
- NORIKAについて
NORIKAについて
内部構造図
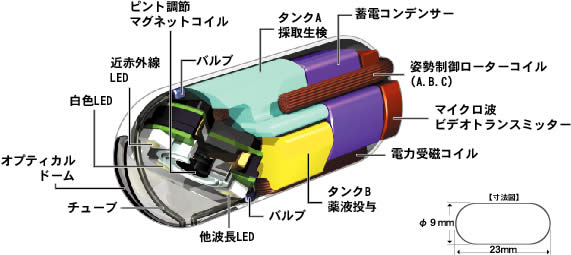
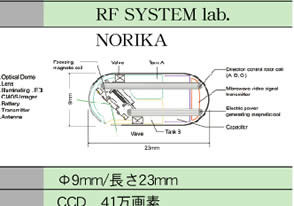
当チームが開発したカプセル型内視鏡「NORIKA」システムは超小型カプセル型CCDカメラと無線で制御・操縦するコントローラ、電力送信と姿勢制御用のコイルを内蔵したベストで形成される。
外形は直径9mm、長さ23mmのピル型、筐体部分は樹脂を使用する。内部側面に3つの姿勢制御ローターコイルを囲むように配置し、レンズ部分は周囲にピント調整マグネットコイルと4つのLED、中央の空間部にはバルブをつけたタンクを2つ置く。電力を蓄えるための蓄電コンデンサーとマイクロ波送信部を含めてカメラが完成する。
システムユニット
 |
 |
 |
 |
コントローラは今後の多様性を考え、家庭用ゲーム機のコントロールスティックを採用しモニターを見ながらの操作を可能とした。
無線による電力伝送
 |
 |
一般的なワイヤレスの動力源にはバッテリーがあるが、そもそも人体に有害な物質を含んでいるため、身体内に長時間入れることは避けたい。また、万が一事故でカプセルが身体内に留まってしまった場合の危険性はさらに大きくなる。
一方、人体に悪影響のないバッテリーを開発することが出来たとしても、23mm程度のカプセル型カメラに使用するにはバッテリー自体も超小型で、且つ動作時間などに制限があってはならない。そこで、動力源確保の手段として無線による電力伝送に解を見出した。
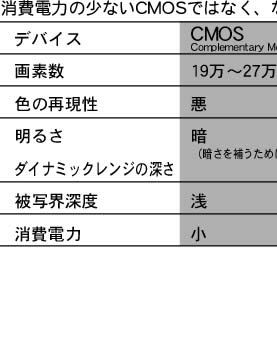
CMOSとCCDの比較
 |
 |
画像をデジタル化するデバイスとして一般的にあげられるのは、CMOS(Complementary Metal Oxide Semiconductor)とCCD(Charge Coupled Device)の二つの撮像素子である。双方の違いは、画像を電気信号として読み出すときの方式の違いである。
CMOSセンサーはCMOS型の半導体を使って読み出している。一方、CCD は電気信号を順繰りに送り出し、DSP(Digital Signal Processor)という半導体によって画像処理を行う。 CMOSイメージセンサーはCCDに比べて消費電力が少ないことが利点である。さらに高感度化に向けての開発が進められている。
しかし、画質面、特に色の再現性や明るさ(ダイナミックレンジの深さ)などの点で、CCDに比べて著しく劣っている。特に暗い体内では、明るさを補うために照明電力を増やすことが必須条件となる。ところが、CCDと同程度の明るさを得るために必要な電力はCCDに比べておよそ2倍に相当する。
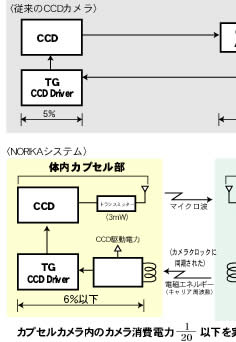
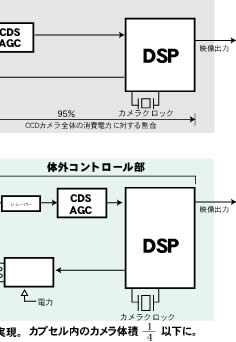
これに対し、CCDの最大の欠点は消費電力が大きいことである。しかし、CCDによって得られる"映像の深み"はCMOSとは比較にならない。当チームはCCDとDSPをマイクロ波で分離することで、消費電力の94%を体外に出すことでこれを解決し、採択に至った。
LEDの調整
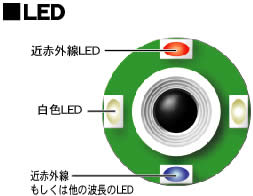 |
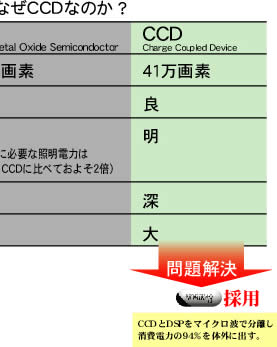
患部を照らす光源には、消費電力の少ない3種類の発光ダイオード(LED)を用いる。CCDの左右に白色LEDを配置し、上下には用途に応じて近赤外線LEDや他波長のLEDを配置する。 |
左右にあるLEDの明るさを個々に変えることで影を作り、前記のピント調整との組み合わせによって、単眼CCDでも立体的映像を作り出せる。また、モニターを見ながら各々の出力を調整することで画像の邪魔になるハレーションを消すことが出来る。さらに上部の近赤外線LED(約800nm〜1100nm)を100%出力にした場合、透過像も撮ることが可能である。
ピントの調整
 |
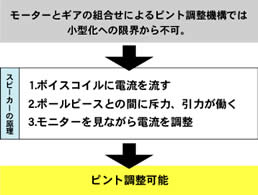 |
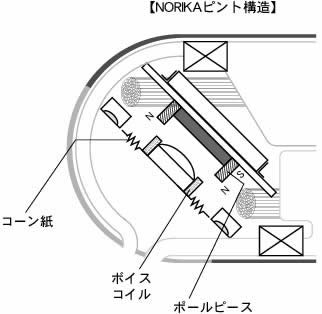
NORIKAのピント調整機構には、磁力による反作用を利用することにした。この動きはスピーカーの原理に似ている。ボイスコイルとそれにつながった円形のコーン紙、ポールピース(磁石)の中央にレンズを置く。ボイスコイルに電流を流すことによって磁界が発生し、固定された磁石との間に斥力・引力が働く。体外のモニターを見ながら電流を調整することで前後にレンズを動かし、ピントを合わせることができる。これによって、まったく新しい考え方のレンズ駆動方法が出来上がった。
回転機能
患部を撮影するにあたって、体内の蠕動運動に委ねるのでは必要な時に必要な部位を撮ることが出来ない。よって、ある程度の動きを操作することが出来るように、カプセルに回転の機能を加えた。
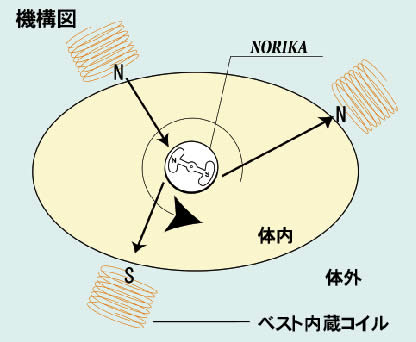
カプセル内にA,B,Cの3つコイルを60度間隔で配置し、これをローターコイル(回転子)とする。ベスト型の服に縫いこんだ3つのコイルをステーター(固定子)とする。回転動作は3極モーターの原理とストロボ発光(低電流充電・短時間放電の繰り返し)に似ている。
体外から電波で送られた電力をカプセル内のコンデンサーに蓄積し、蓄えられた電力をローターコイルに一瞬流す。するとこれにより、短時間ではあるが大きな磁力が発生する。そして、この方向にあわせて体外ステーターコイルにも電流を流して大きな磁力を発生させる。ステーターの磁界の向きによって回転方向は決まり、回転が始まる。
カプセルの位置と傾きはローターコイルとステーターコイルに流れる電流を体外で監視することで、位置は5mm以内、傾きは15度以内の正確さでモニターされる。
M2Aとnorikaの違い
 |
 |
 |
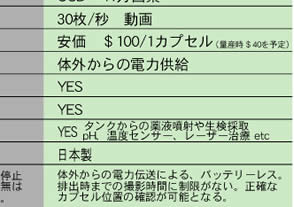 |
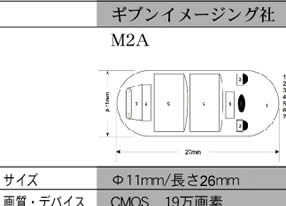
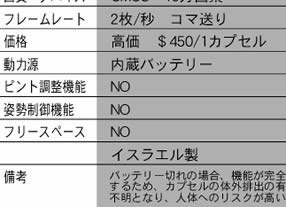
2000年、5月イスラエルのギブンイメージング社が錠剤サイズのカプセルカメラ「M2A」を発表。このニュースが世界中をかけめぐったが、発表後、多くの医師がいくつかの問題点を指摘し、それらを解決するには3年〜7年かかるとされてきた。
電池で動作していることから万一、体内にカプセルが残留してしまった場合、電池内の化学物質が人体に与える影響が心配される。加えて、電池容量に限りがあるため、1秒間に2枚の静止画像しか撮影できず、微妙な動きの観測ができない。
さらに、大腸まで届く前にカプセルカメラの電池は切れてしまう。また、省電力化を目的とし、CMOSセンサーを採用しているため、一般ビデオカメラと比べ解像度が4分の1程度しかなく医師の診断に十分な画像を得られない、などの点である。
「M2A」をカプセル型内視鏡カメラ時代の一世代とすれば、解像度が飛躍的に向上し、医師が無線でモニター映像を見ながら操縦して、患部の診察や治療を行えるこのカメラは、まさにSF映画世界の2.5世代カプセル型内視鏡と言えるだろう。
フリースペース
 |
 |
現段階では患部撮影を主として開発を進めているが、将来は治療や手術での利用も視野に入れている。
カプセル内には全体積の約40%にあたるフリースペースがあり、現在は2つのタンクに分かれている。このフリースペースの目的として現在挙がっているのは、コンパートメントに治療用の薬液を格納し、空気圧などを利用し患部に薬を噴射させること。
二つ目は超小型のハサミやメスを内蔵させることで、生体検査のためのサンプル採取を行うこと。その他、Ph(ペーハー)などを測定するセンサー類などを格納できることなどである。
NORIKAで映した実写映像
NORIKA3で実際に映した映像をご覧いただけます。
|
NORIKA 実写映像 |